
智能导向系统在大口径曲线顶管工程中的应用
一、工程概况
1.1工程背景
本工程为厦门电力进岛第四通道工程电缆控制性工程,管道穿越环岛主干道等重要交通道路。工程主体为#2-#1长度194m、#2-#3长度257.38m、#4-#5长度58m直径Φ3000mm顶管工程,管材采用钢筋混凝土顶管专用管。#1顶管接收井采用沉井施工,#2、#3顶管工作井由于基坑土方开挖深度超过10m,且临近周边立交桥下桥墩基础及道路挡土墙,#2顶管工作井外围北侧旋喷桩最外沿距桥墩基础约4m,南侧旋喷桩距挡土墙约3.5m),根据设计要求,施工时采用灌注桩和高压旋喷桩及H型钢分层水平内支撑开挖施工(见图-1)。

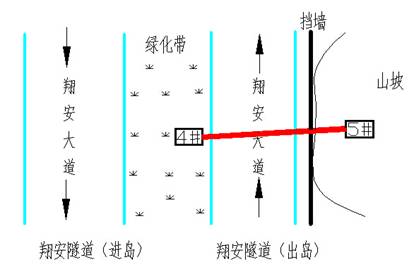
图-1 2#-#1、#2-#3、#4-#5总平面图
#2—#1曲线顶管段长194m(爬坡高度6.731m,曲线半径3369.8846米,设置1套中继间,见图-2、#2-#1、#2-#3断面图),#2—#3顶管段长257.38m(爬坡高差11.097m,设置2套中继间,见图-2),#4-#5顶管长度58米(爬坡高度3.1m,见图-2)
 图-2 #2-#1、#2-#3、#4-#5断面图
图-2 #2-#1、#2-#3、#4-#5断面图
1.2地质概况
根据地质勘查报告和返浆情况,#2-#1、#2-#3顶管段管道穿越地层为砂质粘土,其中#2-#3顶管段局部为全风化花岗岩及卵砾石地层,如图-3,地层分布波动较大,对刀盘切削刀具选择和更换提出更高的要求。


图-3、切削端面取出的部分中风化花岗岩和卵砾石
1.3工程施工难点、重点
(1)、#2工作井位于仙岳路南侧五通立交桥下的中央绿化带上、且与附近立交桥桥墩、环岛干道边上挡墙较近,且工作井设置深度较深(为19.6m);施工支护措施(灌注桩及高压旋喷桩)的施工与临近的立交桥E04桥墩很近(旋喷桩外径距桥墩基础约4m),基坑支护是本工程的难点,见图-4;

图-4、#2顶管工作井采用旋喷桩、内支撑开挖施工
(2)、本工程涉及的地下管线较多,其中雨水、污水管线埋置深度较深、且管径较大, #2、#3顶管工作井基槽开挖深度及顶管轨迹较深,施工过程中各管线的支护加固保护措施及临近立交桥E04桥墩的保护是本段工程的施工重点;
(3)、两顶管段爬坡高度较高,其中#2-#1顶管段还有平面曲线,使得顶管施工过程中的测量难度很大,如何能准确出洞是本工程的施工难点;
(4)、由于本工程#1接收井位于道路边沿,#2工作井临近桥墩、挡墙、#3接收井临近房屋基础,施工监测及顶管时的轴线控制是本工程的重点;
(5)、本工程顶进轴线为三维曲线,所以施工过程中的顶进力控制措施是本工程能顺利贯通的一大难点,我司在后坐墙能承受的设计顶进力范围内采用了8个200T/个双级油缸,行程为3米;并采用了注浆减阻减少顶进力。
1.4施工工期
本工程#2-#1顶管段,长194米,历时48天,#2-#3顶管段,长257.38历时60天。(不包含前期的围护桩施工和沉井施工等)
二、智能引导系统
2.1智能引导系统的组成
智能导向测量系统按传统的连续导线测量的形式布设,为了实现自动测量,该系统需要由以下部分组成:
(1)、每个导线点上的自动全站仪、自动整平基座和自动全站仪配套的棱镜。
(2)、一台计算机,由它控制各台全站仪进行测量和数据的收集处理。
(3)有线通讯设备,包括接线盒、电源、屏蔽线等。


图-5 自动整平基座及仪器和屏蔽线在每一个导线点上安置一台全站仪,管道内的全站仪需要安置在AD-12自动整平基座上,棱镜必须安置在全站仪的手柄上,并且使棱镜中心和全站仪的旋转中心位于同一垂线上(需要棱镜接合器)。每台全站仪都需要通过屏蔽线连接到计算机上,把数据发送到计算机上,由计算机进行处理再传输给全站仪,实现双向通讯,如图-5。
2.2原理
智能导向系统由计算机、全站仪和其他辅助设备组成,通过计算机控制全站仪来测量导线点的坐标,逐站传递最后得到机头坐标,求得机头偏差。


图-6顶管施工测量和竖井联系测量简图
智能导向测量系统的原理就是导线测量的原理。如图-6所示,T1是已知的设站点,在T1处架设第一台全站仪,Pl、Po点为已知的控制点,因为在T1无法直接测量P0点机头坐标,因此就需要在导线点T2、T3架设第二、第三台全站仪,然后通过导线测量测出P1、P2两点的坐标(因为机头一般埋在土里,无法通视),再由两点的坐标归算出P0点的坐标,最后和设计路线相比较,就能得到机头的上下偏差和左右偏差,整个过程都在计算机的控制下进行。
三、工程实例
实例1——厦门电力进岛第四通道工程岛内电缆顶管工程#2-#1顶管段
(1)、地面控制测量

图-7 地面控制测量简图
如图-7所示,KZ1点与KZ2点为整个顶管段的控制点,初测为GPS接收机测量获得,由于GPS的精度难以满足要求,因此拟KZ1点为固定控制点,即坐标不变,KZ1—KZ2的方向不变,通过互视KZ1—KZ2获得KZ2的坐标,保证整个控制网的相对精度不变。在此基础上通过测回法测量导线点D1、D2、D3、D4、D5、D6的坐标。(其中,D6与KZ1因不通视,故增设D4和D5导线点,D3、D6为设计线的起始点与终止点,通过进洞口与出洞口中心点引铅垂线到地面)。
2)、竖井联系测量
如图-7所示,D2为地面导线点,D7、D8为仪器、棱镜台位置,D9为仪器台位置,都是强制对中台(因本工井高度为20米,仪器无法一站测往井内,故增设D7、D8点),保证在顶管顶进过程中能基本保持不变,采用测回法对D8及D9点进行测量。
(3)、高程控制测量
以已知控制点的高程测出工作井内仪器平台(强制对中台)的高程、进洞口的中心高程及出洞口的中心高程。
(4)、智能引导系统实际操作
①操作界面


图-8 系统主界面 图-9 计算出的设
计路线节点信息该系统的主界面由4部分组成:左上角为顶管机头纵断面示意图,中心为设计中心,黄点表示机头当前位置,另外里程及左右偏差、竖直偏差显示在左上角位置;右上图为整段曲线的走势图,每当测量过一个点之后就会记录下当前的位置与偏差显示在右上图中,方便观看;左下图为操作界面,学习以及测量按钮均在该模块中,通过点击按钮可以连接全站仪、设站学习以及自动测量;右下角为即时测量状态,当系统处在测量状态时,该模块可以实时看到测量结果,发生错误时可以即时纠错,见图-8和图-9。
②操作步骤
1)、建数据库、计算设计线路


图-11 全站仪连接界面 图-12 历史偏差数据
设计路线时可根据设计平面轴线复杂程度来设计路线各节点间的间隔,本工程节点间隔为3m。
2)连接全站仪、设站学习
智能导向系统在第一次设站学习时,需一人在井下人工对准,一人在上面操作,等全部设站学习成功后,就可进行第一次测量,测量成功后,在后续的顶进过程可直接在上面用电脑操作测量,可在一两分钟内得出偏差数据,如图-11和图-12。
四、现场照片

图13、工井内强制对中台仪器
图14、管内导线点仪器及自动整平基座




图15、机头棱镜

图16、工井下后视棱镜




图17、管内曲线及爬坡


图18、机头出洞照片


图19、管内支架安装完成照片
五、结论和建议
厦门电力进岛第四通道工程岛内电缆顶管工程为在复杂地层条件下,大口径、长距离、高落差和曲线顶管提供了借鉴和参考,工程具备如下特点:
(1).顶管工作井较深,且与周围构筑物很近,工程施工过程中实现了顶管施工区域沉降实时监测;
(2).轴线轨迹除了因避开已有管道形成平面曲线外,工作井和接收井高差,需要做较大剖面爬坡顶进,顶管机顶进力、中继站和管材提出了更高的要求;
(3).采用智能导向系统进行管道曲线顶进导向,节省了大量的测量和记录工作,在保证测量精度的同时也提高了工作效率;
(4).根据地质条件,配制专用触变泥浆进行注浆减租,减阻效果接近顶进力30%-40%;
通过采用国产顶管机及自主研发智能导向系统,顺利完成业务方提出了工期、施工精度要求。从中可以确定,采用国产设备及导向系统能够完成复杂地质条件下,大口径、长距离、多维曲线的顶管。



